

算法帮助机器人安全地摔倒
乔治亚理工大学的研究人员开发了一个算法来帮助人形机器人在撞倒地面时不会摔坏自己。为家庭、医院和工作提供帮助的机器人能够在不破坏自己的情况下摔倒。
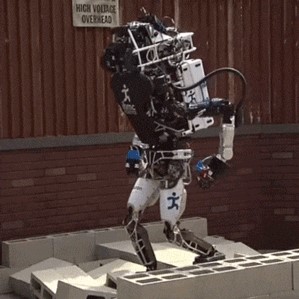
人类和机器认知研究所的研究小组操作的Atlas机器在美国国防部高级研究计划局机器人挑战赛上摔倒。
在六月举行的重要机器人竞赛上,一些数百万美元的机器人努力执行简单的任务,如爬楼梯;一些机器人甚至摔倒。但其中一些失误导致了机器人的仪器、汽车和其他组件的毁灭性损坏。
幸运的是对于这些机器人,研究人员正在探索一种方法使机器人更优雅和更安全地摔倒。随着腿型而不是轮型机器人被用于更复杂的情况下,这项工作将变得重要。
佐治亚理工学院研究人员的灵感来自于人类在摔倒时会伸出胳膊或腿的方式。“当你跌倒时,你试着分散能量,”计算机科学教授KarenLiu表示,与她当时的研究生Sehoon共同开展工作。”每一次与地面接触都会分散一些能量。”
Liu教授和Ha设计了一个算法,使不平衡的机器人学会扭曲身体的方法,以便在落到地面时用更少的力。该算法计算如何构建许多与地面接触的点,以分散摔倒时的冲力。
在上个月德国的一个会议上,佐治亚理工学院描述了利用名为BioloidGP的小型人型机器人测试了算法,以及用名为阿特拉斯的大型人形机器人进行模拟。后者由一家名为波士顿动力公司开发,专业生产先进的腿型机器,目前在谷歌旗下。参与六月赛事的数个团队使用阿特拉斯机器人。在美国国防部高级研究计划局机器人技术挑战赛上,遥控机器人需要执行一系列任务,包括驾驶高尔夫球车,打开门,和操作电钻。
美国国防部高级研究计划局机器人挑战赛主要是为了模拟在协助处理受损核电站时,机器人将遇到的问题,但它也强调了在任何正常的人类环境中,机器人需要攻克的挑战(详见文章 “Why Robots—and Humans—Struggled with DARPA’s Challenge”)。
在美国国防部高级研究计划局的赛事中,伍斯特理工学院小组的领导者Matt DeDonato说,大多数的参赛者更多地关注保持直立,而不是找出更好的方法摔倒,特别是因为每次跌倒会耗费很多时间。为了减少破坏,控制阿特拉斯机器人的团队与CMU的研究人员合作,当检测到跌倒时关闭致动器。但是DeDonato的团队在整个DARPA赛事中设法使机器人保持直立,说这个领域需要被探索,随着更多的机器人变得商业化。“你要保证摔倒几次后仍可使用,”他说。
现谷歌旗下的波士顿动力公司创始人和腿式机器人先驱Marc Raibert介绍,在开发叫做BigDog的四条腿机器人时,他的团队开始时思考如何保护摔倒的机器人。第一个想法是在发现摔倒时,让四肢停住。“这使四肢像长杠杆一样,当四肢冲击地面时,向关节施加大量的力,”他说。“实际上,我们弄坏了一些机器人的腿,所以我们重新对BigDog进行编程,使其关节在跌倒时放松。我们创造的机器人在发现失去平衡时,它们做类似的事情。”
Liu教授说她的研究团队还对防止机器人跌倒时伤害到人的设计方法感兴趣。这可能包括以一种不会面向人摔倒的方式保持平衡,她说。
然而迄今为止,通过大多数机器人的感知能力和计算能力,开发的方法是有限的。对于他们的实验,佐治亚理工学院的研究团队在机器人头部和外部动作捕捉相机上,使用了加速度计。Liu教授评论说对如何最好地跌倒计算的复杂性解释了包括人类在内的很多动物具有自动反应神经系统的原因。
“这就是我们具有反应的原因,”Liu教授说。“我们正在考虑为机器人建立神经系统。”
新材料在线编译整理——翻译:Grubby 校正:摩天轮
- 上一篇 >发行规模大增 2022年绿色债券市场扩容可期2022-02-17
- < 下一篇将二氧化碳转化为绿色能源电池2016-03-07


