

海马启迪机器人设计
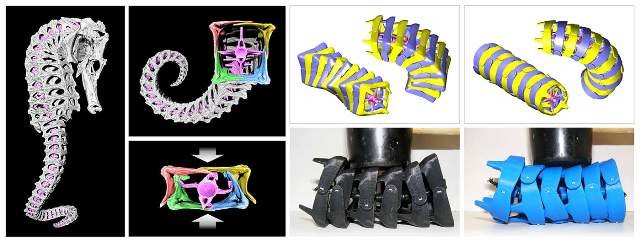
左:海马骨骼由围绕中心脊柱的高度精确骨板组成。右:3D打印原型的弯曲和扭转特性。
加利福尼亚大学圣迭戈分校(University of California, San Diego)研究人员发现相比于圆柱形尾巴,方形的海马尾巴可以抓住、控制并产生更多的接触点。
同时,方形板使得尾巴的强度更高、硬度更大且更耐应变。海马的尾巴大约有36块方状节段,每个节段含有4个L形的角板,其尺寸沿着尾巴的方向逐渐减小。这些角板可以自由滑动或转动,旋转接头类似于球窝关节,具有三个旋转自由度。
滑动关节使骨板移动至另一个。结缔组织的厚胶原层将这些骨板连接至脊椎。脊椎和骨板之间的关节相当灵活,大约有6个自由度。
“几乎所有的动物尾巴的横截面都是圆形或椭圆形,海马除外。我们不知道这是为什么。我们发现,当同时需要抓取和防御时,方形尾巴更加合适。”美国克拉姆森大学(Clemson University)机械工程系助理教授、该研究的首席研究员Michael Porter如此声称。他于2014年在加州大学圣迭戈分校获得材料科学与工程专业博士学位。
根据Porter的说法,一旦其中的一个特性被加强,将削弱其他特性中的至少一个。他与其他研究人员一起调查这种现象。该团队观察到,碾压骨板时,骨板移动只需一个自由度。环形板具有2个自由度,可滑动和旋转。因此,在永久失效前,方形板往往吸收更多的能量。
研究团队采用一系列方法,包括3D打印来模拟海马的方形尾巴,对其进行弯曲、旋转、压缩和粉碎试验。同样的,他们采用3D打印设计了一个由圆形且具有重叠节段的尾巴模型,并进行了类似的试验。
“新技术,如3D打印使我们能够模仿生物设计,还可以建立自然界中并未发现的假设模型。然后,对它们进行测试,激发新的工程应用,并解释生物系统如此发展的原因。”
——Michael Porter, Clemson University
该研究由加州大学圣迭戈分校的Porter发起,并与比利时根特大学(Ghent University)进化生物学教授Dominique Adriaens、加州大学圣迭戈分校材料科学与工程教授Marc Meyers 和Joanna McKittrick进行合作。
“Michael决定采用工程和技术学来解释生物特性。”该研究论文作者之一、Porter的合作导师McKittrick声称。“你可以简化自然并在实验室中进行研究,然后建立新的仿生结构和器件。”同为Porter合作导师及该论文合作者的Meyers这样补充到。
在克莱姆森大学,Porter研究团队正采用这种方法来设计创新的机器人系统和结构,模仿一系列理论和其他生态体系,将其转化成多学科研究——从工程仿生基础的生物学、工程领域直至进一步探索生物学。
相比于由圆形节段组成的模型,如果3D打印的方形海马尾巴是扭曲的,尾巴上的骨板相互妨碍,从而明显限制其活动范围。方形尾巴被扭曲之后,不需要使用大量的能量,它就能很快恢复到原来的形状。研究小组推测这可能防止尾部再次受到损伤。
然而,圆形节段的尾巴很容易扭曲,它需要更多的能量才能恢复到原状。相比于圆形节段尾巴而言,方形尾巴可产生更多的接触点。海马尾巴也会以这样的方式抓取落在视线范围内的物体。
Porter的研究得到了俄勒冈州立大学(Oregon State University)机械工程助理教授、机器人专家Ross L. Hatton的帮助,Ross L. Hatton同时也是该论文的作者之一。他开发了几何原型,用于说明尾巴的力学并表明其形状似这种抓取类型的精确设计。
此外,对3D打印节段模型进行压缩,并与没有任何节段的具有圆形和方形横截面的3D打印固体结构进行性能比较。研究人员发现,固体结构中与海马尾巴关节相同位置的地方完全破碎。这说明这种结构可以吸收更多的能量。
此外,在所有的粉碎试验中,方形模型优于圆形模型,因为方形节段失效但不改变形状。然而,施加负载以后,圆形节段被打开,其形状由圆形转变成椭圆形。这一点意义重大,因为海马的天敌是水鸟,水鸟用喙捕捉和挤压猎物。
另外,Porter正在研究这样的仿生器件如何应用于现实生活。一种选择是扩大结构,设计一种可在恶劣环境中使用的抓取机器臂;另一种选择是降低结构来开发导管。然而,存在巨大的可能性,该论文作者之一的Meyers如是说。
新材料在线编译整理——翻译:菠菜 校正:摩天轮
- 上一篇 >发行规模大增 2022年绿色债券市场扩容可期2022-02-17
- < 下一篇将二氧化碳转化为绿色能源电池2016-03-07


